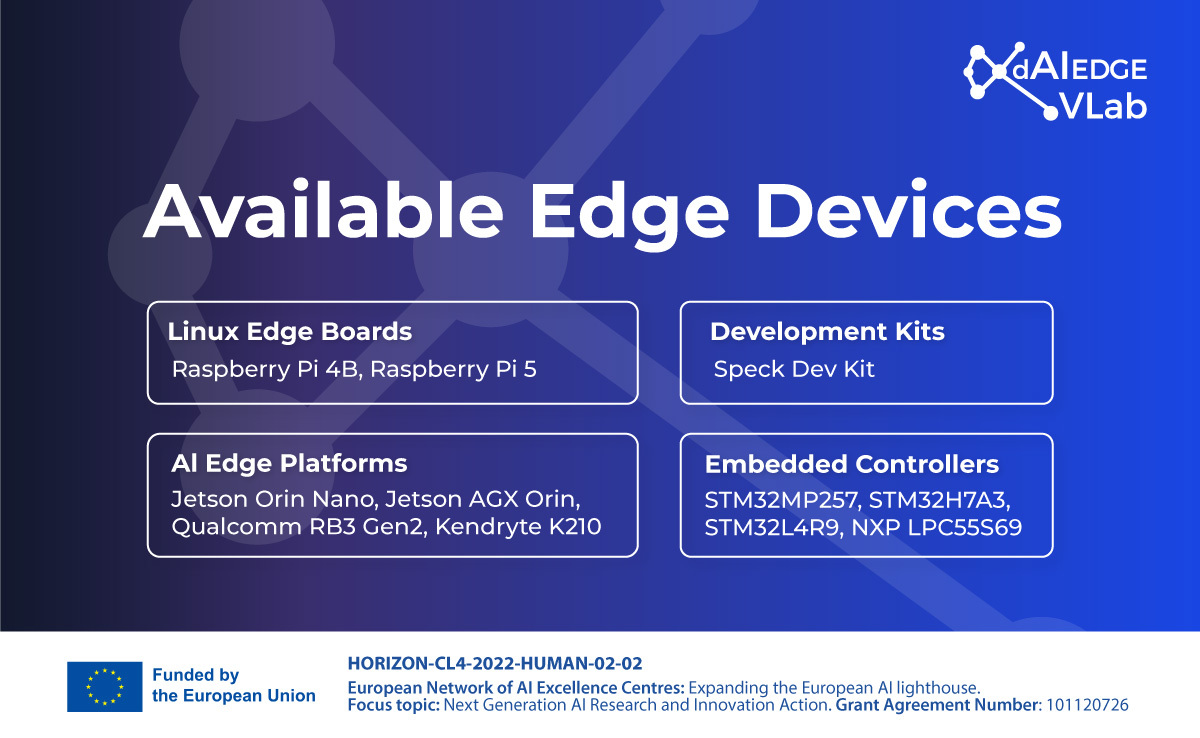
With the aim of facilitating access to these technologies, the dAIEDGE-VLab brings together a catalogue of hardware platforms that allows researchers, developers, businesses and students to experiment with different Edge AI architectures without needing to physically possess the devices.
The Horizon ENFIELD Final Conference brought together researchers, policymakers, industry leaders and European AI initiatives to discuss the future of artificial intelligence in Europe and its transition from research excellence to real-world deployment.
Before installing thousands of sensors across a city, what if planners could already know their impact? That question lies at the heart of DARIUS, the project led by Despina Elisabeth Filippidou, winner of the Third Open Call of dAIEDGE.
When extreme weather strikes, the biggest obstacles are often the ones left behind. Fallen branches, debris and damaged infrastructure can block access for emergency services, making the final metres of an intervention the most difficult. This challenge inspired Konstantinos Tsintotas, winner of the Third Open Call of dAIEDGE, to develop SPOT-LIFT.
The session confirmed the growing interest in this type of initiative, reaching a peak of 45 concurrent attendees and bringing together participants from 12 European countries.
One of the biggest challenges in humanoid robotics is not teaching robots how to walk, it is making them walk efficiently. This is the ambition behind the project led by Andrés González and Alexander Palatnik, winners of the Third Open Call of dAIEDGE.
Robots can perceive the world, but turning perception into safe and efficient action in real time remains a difficult engineering problem, especially when everything must happen directly on-device.
What if data, artificial intelligence models and computing power could be shared and monetised transparently, without relying on centralised platforms?
Vision Transformers have transformed the field of computer vision, delivering remarkable performance in image classification and understanding tasks. Yet their adoption at the Edge remains limited by a fundamental challenge: they demand significant computational power, memory resources and energy consumption.